

Sea el Endomorfismo
\( \begin{matrix}
F:V\rightarrow V &
\\
\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,x \in V \rightarrow F(x) = Ax\in V
\end{matrix} \)
Con V espacio vectorial de dimensión n>1 sobre el cuerpo Κ
Sean λj, con j = 1, 2, ...k las raices del polinomio característico asociado al Endomorfismo cada una de ellas con multiplicidad mj.
Ya hemos visto que para cada Endomorfismo F, existe una matriz A, de dimensión nxn tal que
F(v) = Av
Supongamos que A no es diagonalizable, es decir, la suma de las dimensiones de los autoespacios generados por cada autovalor es menor que n, es decir, las bases de autovectores no llenan todo el espacio V. En este caso, la matriz como decimos no es diagonalizable, pero sí es posible encontrar una base de V donde la matriz se expresa en (o es semejante a) una forma sencilla que llamaremos de Jordan y que tiene la forma
$$J=\begin{pmatrix} J_{1}& & & \\ & J_{2} & \\ & & ... & \\ & & & J_{n} \end{pmatrix}$$
Cada uno de los bloques j, de la diagonal tiene submatriz J_{j} la cual es una matriz que, o bien diagonal o bien tiene la forma:
$$J_{j}=\begin{pmatrix} \lambda_{1}& 1 & & \\ & \lambda_{2} & 1 & \\ & & ... & 1 \\ & & & \lambda_{mj} \end{pmatrix}$$
Forma Canónica de Jordan
Principios y conceptos básicos
Teoría en Extensión
Sea nuestro Endomorfismo
\( \begin{matrix} F:V\rightarrow V & \\ \,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,x \in V \rightarrow F(x) = Ax\in V \end{matrix} \)
Con V espacio vectorial de dimensión n>1 sobre el cuerpo Κ
Y sea A la matriz mxm asociada, sea también
$$P(x) = (x-\lambda_1)^{m_1}(x-\lambda_2)^{m_2} ... (x-\lambda_k)^{m_k}$$
El polinómio característico de la matriz A, con λj ∈K autovalores de A y los mj la multiplicidad correspondiente a cada autovalor j. ∀j=1,2,...,k.
El siguiente teorema nos dice como se descompone el espacio V en los autoespacios correspondientes a cada autovalor de la matriz A
Fj = F|Ej : Ej→ Ej
Es decir, Fj es la restricción de F al autoespacio máximo Ej
Para cada Fj se puede encontrar una base Bj en la cual Fj se puede escribir como una matriz de Jordan.
Nótese que la suma de las multiplicidades es la dimensión total:
∑kj=1 mj = n
Nótese que la dimensión del autoespacio máximo es la multiplicidad del autovalor mj. No hay que confundir este concepto con el autoespacio, cuya dimensión se le llama multiplicidad geométrica y en general es menor o igual a mj.
O sea, cada autoespacio máximo, ese sí, debe ser de dimensión igual a la multiplicidad (algebraica) del autovalor. Supongamos que el autovalor λj tiene multiplicidad mj, sin embargo, al calcular los autovectores aparecen sj con sj < mj.
En este caso tenemos que encontrar mj - sj vectores linealmente independientes y la caja de Jordan correspondiente al autovalor λj, J(λj) será de la forma
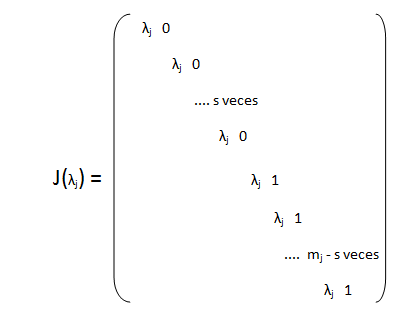
Como encontrar la base de vectores en la que la matrix A tiene esta expresión? Veremos a continuación dos modos de hacerlo.
\( \begin{matrix} F:V\rightarrow V & \\ \,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,\,x \in V \rightarrow F(x) = Ax\in V \end{matrix} \)
Con V espacio vectorial de dimensión n>1 sobre el cuerpo Κ
Y sea A la matriz mxm asociada, sea también
$$P(x) = (x-\lambda_1)^{m_1}(x-\lambda_2)^{m_2} ... (x-\lambda_k)^{m_k}$$
El polinómio característico de la matriz A, con λj ∈K autovalores de A y los mj la multiplicidad correspondiente a cada autovalor j. ∀j=1,2,...,k.
El siguiente teorema nos dice como se descompone el espacio V en los autoespacios correspondientes a cada autovalor de la matriz A
Teorema (Descomposición de subespacios correspondientes a cada autovalor)
Sea el autovalor λj y mj su multiplicidad, entonces ∃p ∈ N tal que
\( E_1(\lambda_j)=ker(A-\lambda_jI)\subseteq E_2(\lambda_j)=ker(A-\lambda_jI)^2 \subseteq ... \subseteq E_p(\lambda_p)=ker(A-\lambda_jI)^p \)
Además si \( d_j=Dimension(E_p(\lambda_j)) \) se cumple que \( d_1 \leq d_2 \leq ...\leq d_p = m_j \)
El subespacio \( E_p(\lambda_j) \) recibe el nombre de autoespacio máximo correspondiente al autovalor λj ó simplemente Ej.
Cada subespacio Ej es invariante por la aplicación A, además el espacio total V, es la suma directa de todos los Ej, es decir
$$V=E_1\oplus ... \oplus E_k$$
Por ser cada autoespacio Ej invariante mediante la aplicación F, podemos considerar la aplicación
Sea el autovalor λj y mj su multiplicidad, entonces ∃p ∈ N tal que
\( E_1(\lambda_j)=ker(A-\lambda_jI)\subseteq E_2(\lambda_j)=ker(A-\lambda_jI)^2 \subseteq ... \subseteq E_p(\lambda_p)=ker(A-\lambda_jI)^p \)
Además si \( d_j=Dimension(E_p(\lambda_j)) \) se cumple que \( d_1 \leq d_2 \leq ...\leq d_p = m_j \)
El subespacio \( E_p(\lambda_j) \) recibe el nombre de autoespacio máximo correspondiente al autovalor λj ó simplemente Ej.
Cada subespacio Ej es invariante por la aplicación A, además el espacio total V, es la suma directa de todos los Ej, es decir
$$V=E_1\oplus ... \oplus E_k$$
Fj = F|Ej : Ej→ Ej
Es decir, Fj es la restricción de F al autoespacio máximo Ej
Para cada Fj se puede encontrar una base Bj en la cual Fj se puede escribir como una matriz de Jordan.
Nótese que la suma de las multiplicidades es la dimensión total:
∑kj=1 mj = n
Nótese que la dimensión del autoespacio máximo es la multiplicidad del autovalor mj. No hay que confundir este concepto con el autoespacio, cuya dimensión se le llama multiplicidad geométrica y en general es menor o igual a mj.
O sea, cada autoespacio máximo, ese sí, debe ser de dimensión igual a la multiplicidad (algebraica) del autovalor. Supongamos que el autovalor λj tiene multiplicidad mj, sin embargo, al calcular los autovectores aparecen sj con sj < mj.
En este caso tenemos que encontrar mj - sj vectores linealmente independientes y la caja de Jordan correspondiente al autovalor λj, J(λj) será de la forma
Como encontrar la base de vectores en la que la matrix A tiene esta expresión? Veremos a continuación dos modos de hacerlo.
1a Forma de encontrar la matriz del cambio de base y la base de Vectores
Primero elegimos los v1, ..., vs los autovectores correspondientes al autovalor λj.
Estos autovectores generan el autoespacio Ej(λj).
Ahora buscamos un autovector vs+1 linealmente independiente con los anteriores y tal que
\( (J( \lambda_j)-\lambda_jI)v_{s+1}=k_1v_1+...+k_sv_s \)
Ahora buscamos otro autovector vs+2 linealmente independiente con los anteriores y tal que
\(J(\lambda_j)-\lambda_jI)v_{s+2}=k_1v_1+...+k_sv_s+k_{s+1}v_{s+1} \)
Y así sucesivamente hasta completar los mj.
La matriz del cambio de base asociada será la formada por la base de vectores v1, ..., vmj escritos en columna:
B = (v1 ...vs vs+1 ... vmj).
2a Forma de encontrar la matriz del cambio de base y la base de Vectores
Consiste en elegir kp vectores {v1, ..., vkp} linealmente independientes tales que que v1, ..., vkp ∈ Ep(λj) - Ep-1(λj)
La familia de vectores
Bkp(λj) = {(A - λjId)p-1v1, ..., (A - λjId)v1, v1, ... , (A - λjId)p-1vkp, ..., (A - λjId)vkp, vkp}
Conforma una base en la que la matriz A restringida a Ep(λ) se expresa en forma de kp cajas de Jordan.
A continuación elegimos otros kp-1 {v1, ..., vkp-1} vectores linealmente independientes tales que que v1, ..., vkp-1 ∈ Ep-1(λj) - Ep-2(λj) y que sean linealmente independientes con la familia Bkp(λj).
Ahora, la familia de vectores
Bkp-1(λj) = {(A - λjId)p-2v1, ..., (A - λjId)v1, v1, ... , (A - λjId)p-1vkp-1, ..., (A - λjId)vkp-1, vkp-1}
Conforma una base en la que la matriz A restringida a Ep-1(λ) se expresa en forma de kp-1 cajas de Jordan.
Y así sucesivamente hasta llegar a E1(λ), entonces si tomamos la base formada por
B(λ) = B1 ∪ B2 ∪ ... ∪ Bp
Conforma una base del espacio vectorial V, la expresión donde A en esta base es en la forma canónica de Jordan.
Finalmente veremos un teorema de existencia y unicidad de la forma canónica de Jordan
Teorema (Existencia y unicidad de la forma de Jordan)
Sea el Endomorfismo
F : V → V
x∈V → F(v) = Ax∈V
Con V espacio vectorial de dimensión n>1 sobre el cuerpo Κ, y sea A la matriz asociada a este Endomorfismo.
Supongamos que el polinomio característico de A tiene n raices en el cuerpo K entonces
1) Existe una base de V en la que A se expresa en la forma canónica de Jordan.
2) La forma de Jordan del apartado anterior es única salvo permutaciones de las cajas de Jordan que la componen.
Sea el Endomorfismo
F : V → V
x∈V → F(v) = Ax∈V
Con V espacio vectorial de dimensión n>1 sobre el cuerpo Κ, y sea A la matriz asociada a este Endomorfismo.
Supongamos que el polinomio característico de A tiene n raices en el cuerpo K entonces
1) Existe una base de V en la que A se expresa en la forma canónica de Jordan.
2) La forma de Jordan del apartado anterior es única salvo permutaciones de las cajas de Jordan que la componen.
Te ha parecido que estos cálculos son muy complicados, no lo son en absoluto, te convencerás si echas un breve vistazo a estos dos ejemplos
Ejemplo 1
Ejemplo 2
Ha sido util? Alguna idea para complementar el texto?
Deja tu post
Comentarios de otros usuarios
Deja tu post
