Presentamos ahora el concepto de atlas, que es un conjunto de cartas que recubren todo el espacio topológico.
Es muy importante pararse un poco en el concepto de atlas en su punto 2. Viene a decir que el cambio de coordenadas entre varias cartas puede hacerse de manera difenreciable, esto es el famoso teorema de cambio de coordenadas para superfícies regulares, pero ahora en lugar de ser un teorema forma parte de la defición.
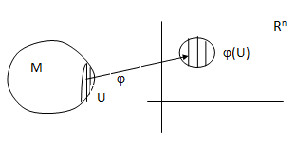
Dado un espacio topológico, queremos que todo entorno de un punto sea parecido a un \( \mathbb{R}^n \). Esto es lo que hace una carta, representa un entorno de la variedad como un abierto de \( \mathbb{R}^n \).
Definición de Variedad diferenciable
Una variedad diferenciable C∞ es un espacio topológico Hausdorff dotado de un atlas maximal C∞.
En una curva en \( \mathbb{R}^n \) se define el espacio tangente como el generado por el vector tangente a la curva.
En una superficie regular en R
n se define el espacio tangente como aquel generado por dos vectores tangentes linealmente independientes: un plano.
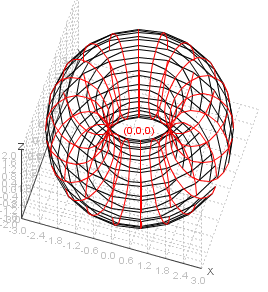
En una variedad diferenciable, en general no hay espacio ambiente, por lo tanto el concepto de espacio tangente debe definirse de un modo un poco diferente. Lo que se hace es, dada una función en la variedad, tomar como vectores tangentes el operador derivada direccional de dicha función.
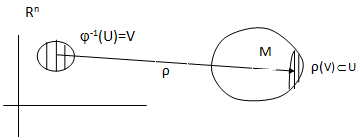
Sea x un punto de la variedad diferenciable M, sea \( (U, \varphi) \) una carta cuyo entorno coordenado U contiene a x, sea f una funcion de la variedad en \( \mathbb{R} \), Entonces se define un vector tangente en x y en la dirección i como
\( \partial_{i} = \frac {\partial(f o \varphi^{-1}) }{\partial x_{i}}(x) \)
Lo primero a notar es que
\( \begin{matrix} \; \; \; \; \varphi & f \\ \mathbb{R}^n \mapsto & M \mapsto \mathbb{R} \end{matrix} \)
Por tanto \( \partial_{i} \) es un operador que toma funciones y las aplica en elementos de \( \mathbb{R} \), calcula su derivada en la dirección i en cada punto.
Ahora bien, todo vector del espacio tangente, en general es entonces una combinación lineal de estos operadores.
Definición de espacio tangente
Así consideramos la base de vectores \( \partial_{1}, \partial_{2}, ..., \partial_{n} \) las cuales generan un espacio vectorial en cada punto p de M que llamamos espacio tangente de M en p y denotamos por \( T_p(M) \). Por tanto
\( T_p(M)^ = SPAN(\{ \partial_{1}, \partial_{2}, ..., \partial_{n} \}) \)
Así Todo elemento V del espacio tangente es de la forma:
\( V \in T_p(M) \Rightarrow V = \sum_{j=1}^{n} C_j\partial_j \)
Además, se define el dual de Tp(M) que se llama espacio cotangente en p y que denotamos como \( T_p(M)^* \) que es generado por la base de covectores.
\( T_p(M)^* = SPAN(\{ dx^{1}, dx^{2}, ..., dx^{n} \}) \)
También llamados 1-formas.
Esta sección es bien abstracta, por eso no incluiremos mucha más teoría aquí, solo hacer énfasis de nuevo que la definición de variedad contiene el teorema de cambio de coordenadas, lo que supone una diferencia notable con las superficies regulares o las curvas.